
500+ MCQ’s Questions of digital Image Processing mcq question 2021 – Image processing is a method to perform some operations on an image, in order to get an enhanced image or to extract some useful information from it. It is a type of signal processing in which input is an image and output may be image or characteristics/features associated with that image.
Here’s the list of chapters on the “Digital Image Processing” subject covering 100+ topics. You can practice the MCQs chapter by chapter . digital image processing mcq questions
DIP ALL CHAPTERS
- Basic of Digital Image Processing
- Digital Image Fundamentals
- Intensity Transformations and Spatial Filtering
- Filtering in Frequency Domain
- Image Restoration and Reconstruction
- Color Image Processing
- Image Compression
- Morphological Image Processing
- Image Segmentation
- Representation and Description
- Wavelet based Image Processing
- Image Enhancement
- Object Recognition
Intensity Transformations and Spatial Filtering
The section contains MCQs on smoothing and sharpening spatial filters, intensity transformation functions, spatial filtering and its fundamentals, spatial enhancement methods, histogram processing, smoothing linear and non-linear spatial filters, fuzzy techniques for intensity, transformation and filtering, unsharp masking, intensity transformation techniques, piecewise-linear transformation functions, noise reduction by spatial and domain filtering.
TOPIC
- Smoothing Spatial Filters
- Basic Intensity Transformation Functions
- Sharpening Spatial Filters-1
- Sharpening Spatial Filters-2
- Sharpening Spatial Filters-3
- Combining Spatial Enhancements Methods
- Fundamentals of Spatial Filtering
- Histogram Processing-1
- Histogram Processing-2
- Smoothing Spatial Filters
- Smoothing Linear Spatial Filters
- Smoothing Nonlinear Spatial Filter
- Spatial Filtering
- Filtering in Frequency Domain
- Smoothing Frequency-Domain Filters
- Unsharp Masking, High-boost filtering and Emphasis Filtering
- Homomorphic filtering
- Intensity Transformation Functions
- Fuzzy Techniques – Transformations and Filtering
- Piecewise-Linear Transformation Functions
- Fuzzy Techniques for Intensity
- Discrete Fourier Transform Implementation
- Noise Reduction by Spatial Filtering
- Noise Reduction by Frequency Domain Filtering
- Smoothing and Sharpening
- Noise Models
Smoothing Spatial Filters
1. Noise reduction is obtained by blurring the image using smoothing filter.
a) True
b) False
View AnswerAnswer: a
Explanation: Noise reduction is obtained by blurring the image using smoothing filter. Blurring is used in pre-processing steps, such as removal of small details from an image prior to object extraction and, bridging of small gaps in lines or curves.
2. What is the output of a smoothing, linear spatial filter?
a) Median of pixels
b) Maximum of pixels
c) Minimum of pixels
d) Average of pixels
View AnswerAnswer: d
Explanation: The output or response of a smoothing, linear spatial filter is simply the average of the pixels contained in the neighbourhood of the filter mask.
3. Smoothing linear filter is also known as median filter.
a) True
b) False
View AnswerAnswer: b
Explanation: Since the smoothing spatial filter performs the average of the pixels, it is also called as averaging filter.
4. Which of the following in an image can be removed by using smoothing filter?
a) Smooth transitions of gray levels
b) Smooth transitions of brightness levels
c) Sharp transitions of gray levels
d) Sharp transitions of brightness levels
View AnswerAnswer: c
Explanation: Smoothing filter replaces the value of every pixel in an image by the average value of the gray levels. So, this helps in removing the sharp transitions in the gray levels between the pixels. This is done because, random noise typically consists of sharp transitions in gray levels.
5. Which of the following is the disadvantage of using smoothing filter?
a) Blur edges
b) Blur inner pixels
c) Remove sharp transitions
d) Sharp edges
Answer: a
Explanation: Edges, which almost always are desirable features of an image, also are characterized by sharp transitions in gray level. So, averaging filters have an undesirable side effect that they blur these edges.
6. Smoothing spatial filters doesn’t smooth the false contours.
a) True
b) False
Answer: b
Explanation: One of the application of smoothing spatial filters is that, they help in smoothing the false contours that result from using an insufficient number of gray levels.
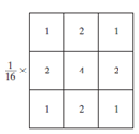
7. The mask shown in the figure below belongs to which type of filter?
a) Sharpening spatial filter
b) Median filter
c) Sharpening frequency filter
d) Smoothing spatial filter
{kind=link}
Answer: d
Explanation: This is a smoothing spatial filter. This mask yields a so called weighted average, which means that different pixels are multiplied with different coefficient values. This helps in giving much importance to the some pixels at the expense of others.
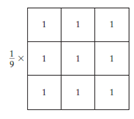
8. The mask shown in the figure below belongs to which type of filter?
a) Sharpening spatial filter
b) Median filter
c) Smoothing spatial filter
d) Sharpening frequency filter
{kind=link}
Answer: c
Explanation: The mask shown in the figure represents a 3×3 smoothing filter. Use of this filter yields the standard average of the pixels under the mask.
9. Box filter is a type of smoothing filter.
a) True
b) False
Answer: a
Explanation: A spatial averaging filter or spatial smoothening filter in which all the coefficients are equal is also called as box filter.
10. If the size of the averaging filter used to smooth the original image to first image is 9, then what would be the size of the averaging filter used in smoothing the same original picture to second in second image?
a) 3
b) 5
c) 9
d) 15
{kind=link}
Answer: d
Explanation: We know that, as the size of the filter used in smoothening the original image that is averaging filter increases then the blurring of the image. Since the second image is more blurred than the first image, the window size should be more than 9.
11. Which of the following comes under the application of image blurring?
a) Object detection
b) Gross representation
c) Object motion
d) Image segmentation
Answer: b
Explanation: An important application of spatial averaging is to blur an image for the purpose of getting a gross representation of interested objects, such that the intensity of the small objects blends with the background and large objects become easy to detect.c
12. Which of the following filters response is based on ranking of pixels?
a) Nonlinear smoothing filters
b) Linear smoothing filters
c) Sharpening filters
d) Geometric mean filter
Answer: a
Explanation: Order static filters are nonlinear smoothing spatial filters whose response is based on the ordering or ranking the pixels contained in the image area encompassed by the filter, and then replacing the value of the central pixel with the value determined by the ranking result.
13. Median filter belongs to which category of filters?
a) Linear spatial filter
b) Frequency domain filter
c) Order static filter
d) Sharpening filter
Answer: c
Explanation: The median filter belongs to order static filters, which, as the name implies, replaces the value of the pixel by the median of the gray levels that are present in the neighborhood of the pixels.
14. Median filters are effective in the presence of impulse noise.
a) True
b) False
Answer: a
Explanation: Median filters are used to remove impulse noises, also called as salt-and-pepper noise because of its appearance as white and black dots in the image.
15. What is the maximum area of the cluster that can be eliminated by using an n×n median filter?
a) n2
b) n2/2
c) 2*n2
d) n
Answer: b
Explanation: Isolated clusters of pixels that are light or dark with respect to their neighbours, and whose area is less than n2/2, i.e., half the area of the filter, can be eliminated by using an n×n median filter.
Basic Intensity Transformation Functions
- Which of the following expression is used to denote spatial domain process?
a) g(x,y)=T[f(x,y)]
b) f(x+y)=T[g(x+y)]
c) g(xy)=T[f(xy)]
d) g(x-y)=T[f(x-y)]
Answer: a
Explanation: Spatial domain processes will be denoted by the expression g(x,y)=T[f(x,y)], where f(x,y) is the input image, g(x,y) is the processed image, and T is an operator on f, defined over some neighborhood of (x, y). In addition, T can operate on a set of input images, such as performing the pixel-by-pixel sum of K images for noise reduction.
- Which of the following shows three basic types of functions used frequently for image enhancement?
a) Linear, logarithmic and inverse law
b) Power law, logarithmic and inverse law
c) Linear, logarithmic and power law
d) Linear, exponential and inverse law
Answer: b
Explanation: In introduction to gray-level transformations, which shows three basic types of functions used frequently for image enhancement: linear (negative and identity transformations), logarithmic (log and inverse-log transformations), and power-law (nth power and nth root transformations).The identity function is the trivial case in which output intensities are identical to input intensities. It is included in the graph only for completeness.
- Which expression is obtained by performing the negative transformation on the negative of an image with gray levels in the range[0,L-1] ?
a) s=L+1-r
b) s=L+1+r
c) s=L-1-r
d) s=L-1+r
Answer: c
Explanation: The negative of an image with gray levels in the range[0,L-1] is obtained by using the negative transformation, which is given by the expression: s=L-1-r.
- What is the general form of representation of log transformation?
a) s=clog10(1/r)
b) s=clog10(1+r)
c) s=clog10(1*r)
d) s=clog10(1-r)
Answer: b
Explanation: The general form of the log transformation: s=clog10(1+r), where c is a constant, and it is assumed that r ≥ 0.
- What is the general form of representation of power transformation?
a) s=crγ
b) c=srγ
c) s=rc
d) s=rcγ
Answer: a
Explanation: Power-law transformations have the basic form: s=crγ where c and g are positive constants. Sometimes s=crγ is written as s=c.(r+ε)γ to account for an offset (that is, a measurable output when the input is zero).
6. What is the name of process used to correct the power-law response phenomena?
a) Beta correction
b) Alpha correction
c) Gamma correction
d) Pie correction
Answer: c
Explanation: A variety of devices used for image capture, printing, and display respond according to a power law. By convention, the exponent in the power-law equation is referred to as gamma .The process used to correct these power-law response phenomena is called gamma correction.
7. Which of the following transformation function requires much information to be specified at the time of input?
a) Log transformation
b) Power transformation
c) Piece-wise transformation
d) Linear transformation
Answer: c
Explanation: The practical implementation of some important transformations can be formulated only as piecewise functions. The principal disadvantage of piecewise functions is that their specification requires considerably more user input.
8. In contrast stretching, if r1=s1 and r2=s2 then which of the following is true?
a) The transformation is not a linear function that produces no changes in gray levels
b) The transformation is a linear function that produces no changes in gray levels
c) The transformation is a linear function that produces changes in gray levels
d) The transformation is not a linear function that produces changes in gray levels
Answer: b
Explanation: The locations of points (r1,s1) and (r2,s2) control the shape of the transformation function. If r1=s1 and r2=s2 then the transformation is a linear function that produces no changes in gray levels.
9. In contrast stretching, if r1=r2, s1=0 and s2=L-1 then which of the following is true?
a) The transformation becomes a thresholding function that creates an octal image
b) The transformation becomes a override function that creates an octal image
c) The transformation becomes a thresholding function that creates a binary image
d) The transformation becomes a thresholding function that do not create an octal image
Answer: c
Explanation: If r1=r2, s1=0 and s2=L-1,the transformation becomes a thresholding function that creates a binary image.
10. In contrast stretching, if r1≤r2 and s1≤s2 then which of the following is true?
a) The transformation function is double valued and exponentially increasing
b) The transformation function is double valued and monotonically increasing
c) The transformation function is single valued and exponentially increasing
d) The transformation function is single valued and monotonically increasing
Answer: d
Explanation: The locations of points (r1,s1) and (r2,s2) control the shape of the transformation function. If r1≤r2 and s1≤s2 then the function is single valued and monotonically increasing.
11. In which type of slicing, highlighting a specific range of gray levels in an image often is desired?
a) Gray-level slicing
b) Bit-plane slicing
c) Contrast stretching
d) Byte-level slicing
Answer: a
Explanation: Highlighting a specific range of gray levels in an image often is desired in gray-level slicing. Applications include enhancing features such as masses of water in satellite imagery and enhancing flaws in X-ray images.
12. Which of the following depicts the main functionality of the Bit-plane slicing?
a) Highlighting a specific range of gray levels in an image
b) Highlighting the contribution made to total image appearance by specific bits
c) Highlighting the contribution made to total image appearance by specific byte
d) Highlighting the contribution made to total image appearance by specific pixels
Answer: b
Explanation: Instead of highlighting gray-level ranges, highlighting the contribution made to total image appearance by specific bits might be desired. Suppose , each pixel in an image is represented by 8 bits. Imagine that the image is composed of eight 1-bit planes, ranging from bit-plane 0 for the least significant bit to bit-plane 7 for the most significant bit. In terms of 8-bit bytes, plane 0 contains all the lowest order bits in the bytes comprising the pixels in the image and plane 7 contains all the high-order bits.
Sharpening Spatial Filters
1. Which of the following is the primary objective of sharpening of an image?
a) Blurring the image
b) Highlight fine details in the image
c) Increase the brightness of the image
d) Decrease the brightness of the image
Answer: b
Explanation: The sharpening of image helps in highlighting the fine details that are present in the image or to enhance the details that are blurred due to some reason like adding noise.
2. Image sharpening process is used in electronic printing.
a) True
b) False
Answer: a
Explanation: The applications of image sharpening is present in various fields like electronic printing, autonomous guidance in military systems, medical imaging and industrial inspection.
3. In spatial domain, which of the following operation is done on the pixels in sharpening the image?
a) Integration
b) Average
c) Median
d) Differentiation
Answer: d
Explanation: We know that, in blurring the image, we perform the average of pixels which can be considered as integration. As sharpening is the opposite process of blurring, logically we can tell that we perform differentiation on the pixels to sharpen the image.
4. Image differentiation enhances the edges, discontinuities and deemphasizes the pixels with slow varying gray levels.
a) True
b) False
Answer: a
Explanation: Fundamentally, the strength of the response of the derivative operative is proportional to the degree of discontinuity in the image. So, we can state that image differentiation enhances the edges, discontinuities and deemphasizes the pixels with slow varying gray levels.
5. In which of the following cases, we wouldn’t worry about the behaviour of sharpening filter?
a) Flat segments
b) Step discontinuities
c) Ramp discontinuities
d) Slow varying gray values
Answer: d
Explanation: We are interested in the behavior of derivatives used in sharpening in the constant gray level areas i.e., flat segments, and at the onset and end of discontinuities, i.e., step and ramp discontinuities.
- Which of the following is the valid response when we apply a first derivative?
a) Non-zero at flat segments
b) Zero at the onset of gray level step
c) Zero in flat segments
d) Zero along ramps
Answer: c
Explanation: The derivations of digital functions are defined in terms of differences. The definition we use for first derivative should be zero in flat segments, nonzero at the onset of a gray level step or ramp and nonzero along the ramps.
- Which of the following is not a valid response when we apply a second derivative?
a) Zero response at onset of gray level step
b) Nonzero response at onset of gray level step
c) Zero response at flat segments
d) Nonzero response along the ramps
Answer: b
Explanation: The derivations of digital functions are defined in terms of differences. The definition we use for second derivative should be zero in flat segments, zero at the onset of a gray level step or ramp and nonzero along the ramps.
- If f(x,y) is an image function of two variables, then the first order derivative of a one dimensional function, f(x) is:
a) f(x+1)-f(x)
b) f(x)-f(x+1)
c) f(x-1)-f(x+1)
d) f(x)+f(x-1)
Answer: a
Explanation: The first order derivative of a single dimensional function f(x) is the difference between f(x) and f(x+1).
That is, ∂f/∂x=f(x+1)-f(x).
- Isolated point is also called as noise point.
a) True
b) False
Answer: a
Explanation: The point which has very high or very low gray level value compared to its neighbours, then that point is called as isolated point or noise point. The noise point of is of one pixel size.
- What is the thickness of the edges produced by first order derivatives when compared to that of second order derivatives?
a) Finer
b) Equal
c) Thicker
d) Independent
Answer: c
Explanation: We know that, the first order derivative is nonzero along the entire ramp while the second order is zero along the ramp. So, we can conclude that the first order derivatives produce thicker edges and the second order derivatives produce much finer edges.
- First order derivative can enhance the fine detail in the image compared to that of second order derivative.
a) True
b) False
Answer: b
Explanation: The response at and around the noise point is much stronger for the second order derivative than for the first order derivative. So, we can state that the second order derivative is better to enhance the fine details in the image including noise when compared to that of first order derivative.
- Which of the following derivatives produce a double response at step changes in gray level?
a) First order derivative
b) Third order derivative
c) Second order derivative
d) First and second order derivatives
Answer: c
Explanation: Second order derivatives produce a double line response for the step changes in the gray level. We also note of second-order derivatives that, for similar changes in gray-level values in an image, their response is stronger to a line than to a step, and to a point than to a line.
Sharpening Spatial Filters-2
- The objective of sharpening spatial filters is/are to _
a) Highlight fine detail in an image
b) Enhance detail that has been blurred because of some error
c) Enhance detail that has been blurred because of some natural effect of some method of image acquisition
d) All of the mentioned
Answer: d
Explanation: Highlighting the fine detail in an image or Enhancing detail that has been blurred because of some error or some natural effect of some method of image acquisition, is the principal objective of sharpening spatial filters.
- Sharpening is analogous to which of the following operations?
a) To spatial integration
b) To spatial differentiation
c) All of the mentioned
d) None of the mentioned
Answer: b
Explanation: Smoothing is analogous to integration and so, sharpening to spatial differentiation.
- Which of the following fact(s) is/are true about sharpening spatial filters using digital differentiation?
a) Sharpening spatial filter response is proportional to the discontinuity of the image at the point where the derivative operation is applied
b) Sharpening spatial filters enhances edges and discontinuities like noise
c) Sharpening spatial filters deemphasizes areas that have slowly varying gray-level values
d) All of the mentioned
Answer: d
Explanation: Derivative operator’s response is proportional to the discontinuity of the image at the point where the derivative operation is applied.
Image differentiation enhances edges and discontinuities like noise and deemphasizes areas that have slowly varying gray-level values.
Since a sharpening spatial filters are analogous to differentiation, so, all the above mentioned facts are true for sharpening spatial filters.
- Which of the facts(s) is/are true for the first order derivative of a digital function?
a) Must be nonzero in the areas of constant grey values
b) Must be zero at the onset of a gray-level step or ramp discontinuities
c) Must be nonzero along the gray-level ramps
d) None of the mentioned
Answer: c
Explanation: The first order derivative of a digital function is defined as:
Must be zero in the areas of constant grey values.
Must be nonzero at the onset of a gray-level step or ramp discontinuities.
Must be nonzero along the gray-level ramps.
- Which of the facts(s) is/are true for the second order derivative of a digital function?
a) Must be zero in the flat areas
b) Must be nonzero at the onset and end of a gray-level step or ramp discontinuities
c) Must be zero along the ramps of constant slope
d) All of the mentioned
Answer: c
Explanation: The second order derivative of a digital function is defined as:
Must be zero in the flat areas i.e. areas of constant grey values.
Must be nonzero at the onset of a gray-level step or ramp discontinuities.
Must be zero along the gray-level ramps of constant slope.
- The derivative of digital function is defined in terms of difference. Then, which of the following defines the first order derivative ∂f/∂x= _ of a one-dimensional function f(x)?
a) f(x+1)-f(x)
b) f(x+1)+ f(x-1)-2f(x)
c) All of the mentioned depending upon the time when partial derivative will be dealt along two spatial axes
d) None of the mentioned
Answer: a
Explanation: The definition of a first order derivative of a one dimensional image f(x) is:
∂f/∂x= f(x+1)-f(x), where the partial derivative is used to keep notation same even for f(x, y) when partial derivative will be dealt along two spatial axes.
- The derivative of digital function is defined in terms of difference. Then, which of the following defines the second order derivative ∂2 f/∂x2 = _ of a one-dimensional function f(x)?
a) f(x+1)-f(x)
b) f(x+1)+ f(x-1)-2f(x)
c) All of the mentioned depending upon the time when partial derivative will be dealt along two spatial axes
d) None of the mentioned
Answer: b
Explanation: The definition of a second order derivative of a one dimensional image f(x) is:
(∂2 f)/∂x2 =f(x+1)+ f(x-1)-2f(x), where the partial derivative is used to keep notation same even for f(x, y) when partial derivative will be dealt along two spatial axes.
- What kind of relation can be obtained between first order derivative and second order derivative of an image having a on the basis of edge productions that shows a transition like a ramp of constant slope?
a) First order derivative produces thick edge while second order produces a very fine edge
b) Second order derivative produces thick edge while first order produces a very fine edge
c) Both first and second order produces thick edge
d) Both first and second order produces a very fine edge
Answer: a
Explanation: the first order derivative remains nonzero along the entire ramp of constant slope, while the second order derivative remain nonzero only at onset and end of such ramps.
If an edge in an image shows transition like the ramp of constant slope, the first order and second order derivative values shows the production of thick and finer edge respectively.
- What kind of relation can be obtained between first order derivative and second order derivative of an image on the response obtained by encountering an isolated noise point in the image?
a) First order derivative has a stronger response than a second order
b) Second order derivative has a stronger response than a first order
c) Both enhances the same and so the response is same for both first and second order derivative
d) None of the mentioned
Answer: b
Explanation: This is because a second order derivative is more aggressive toward enhancing sharp changes than a first order.
- What kind of relation can be obtained between the response of first order derivative and second order derivative of an image having a transition into gray-level step from zero?
a) First order derivative has a stronger response than a second order
b) Second order derivative has a stronger response than a first order
c) Both first and second order derivative has the same response
d) None of the mentioned
Answer: c
Explanation: This is because a first order derivative has stronger response to a gray-level step than a second order, but, the response becomes same if transition into gray-level step is from zero.
- If in an image there exist similar change in gray-level values in the image, which of the following shows a stronger response using second order derivative operator for sharpening?
a) A line
b) A step
c) A point
d) None of the mentioned
Answer: c
Explanation: second order derivative shows a stronger response to a line than a step and to a point than a line, if there is similar changes in gray-level values in an image.
Sharpening Spatial Filters – 3
- The principle objective of Sharpening, to highlight transitions is __
a) Pixel density
b) Composure
c) Intensity
d) Brightness
Answer: c
Explanation: The principle objective of Sharpening, to highlight transitions is Intensity.
- How can Sharpening be achieved?
a) Pixel averaging
b) Slicing
c) Correlation
d) None of the mentioned
Answer: d
Explanation: Sharpening is achieved using Spatial Differentiation.
- What does Image Differentiation enhance?
a) Edges
b) Pixel Density
c) Contours
d) None of the mentioned
Answer: a
Explanation: Image Differentiation enhances Edges and other discontinuities.
- What does Image Differentiation de-emphasize?
a) Pixel Density
b) Contours
c) Areas with slowly varying intensities
d) None of the mentioned
Answer: c
Explanation: Image Differentiation de-emphasizes areas with slowly varying intensities.
- The requirements of the First Derivative of a digital function:
a) Must be zero in areas of constant intensity
b) Must be non-zero at the onset of an intensity step
c) Must be non-zero along ramps
d) All of the Mentioned
Answer: d
Explanation: All the three conditions must be satisfied.
- What is the Second Derivative of Image Sharpening called?
a) Gaussian
b) Laplacian
c) Canny
d) None of the mentioned
Answer: b
Explanation: It is also called Laplacian.
- The ability that rotating the image and applying the filter gives the same result, as applying the filter to the image first, and then rotating it, is called _
a) Isotropic filtering
b) Laplacian
c) Rotation Invariant
d) None of the mentioned
Answer: c
Explanation: It is called Rotation Invariant, although the process used is Isotropic filtering.
- For a function f(x,y), the gradient of ‘f’ at coordinates (x,y) is defined as a _
a) 3-D row vector
b) 3-D column vector
c) 2-D row vector
d) 2-D column vector
Answer: d
Explanation: The gradient is a 2-D column vector.
- Where do you find frequent use of Gradient?
a) Industrial inspection
b) MRI Imaging
c) PET Scan
d) None of the mentioned
Answer: a
Explanation: Gradient is used in Industrial inspection, to aid humans, in detection of defects.
- Which of the following occurs in Unsharp Masking?
a) Blurring original image
b) Adding a mask to original image
c) Subtracting blurred image from original
d) All of the mentioned
Answer: d
Explanation: In Unsharp Masking, all of the above occurs in the order: Blurring, Subtracting the blurred image and then Adding the mask.
Digital Image Processing MCQ | Basics Of Image Sampling & Quantization
Basic of Digital Image Processing
ALL unite digital Image Processing MCQ
READ MORE…
If you found this post useful, don’t forget to share this with your friends, and if you have any query feel free to comment it in the comment section.
Thank you
Keep Learning !